ZYWM-J03型 智能交通(tōng)信号協調控制一體化(huà)系統
1、智能交通(tōng)信号協調控制一體化(huà)系統整體結構爲可(kě)移動式一體化(huà)S方式,适用(yòng)于實驗場地較小的(de)場合。
2、熟悉集中式協調交通(tōng)信号控制機的(de)接線方式,了(le)解集中式協調交通(tōng)信号控制機的(de)控制原理(lǐ)及使用(yòng)方法、控制方式優缺點比較。
3、提供交通(tōng)信号控制機的(de)電子元器件說明(míng)及連接電路、驅動程序設計、接口協議和(hé)代碼,可(kě)進行二次開發。
4、系統包括1台集中式協調交通(tōng)信号控制機、1個單路口交通(tōng)信号控制展闆和(hé)1套交通(tōng)信号協調配時控制軟件,系統爲一體化(huà)結構方式。
5、集中式協調交通(tōng)信号控制機:具有多(duō)時段、黃閃、關燈、手動、行人(rén)過街(jiē)控制、手動強制控制等多(duō)種控制方式;具有固定周期控制、多(duō)時段運行控制、特殊日控制、獨立感應控制、無電纜聯動控制、幹道綠波協調控制、聯網協調控制等功能。
6、單路口交通(tōng)信号控制展闆:尺寸100cmX100cm;高(gāo)強度鋁合金框;面闆材料:有機玻璃厚闆;背闆材料:PVC厚闆;展示畫面:高(gāo)精度噴畫;信号指示燈:高(gāo)亮度LED;信号控制:220V固态繼電器。
7、交通(tōng)信号協調配時控制軟件:具有區域配置、電子地圖、相位編輯、手動控制、預案執行、路口配置、系統配置等模塊,可(kě)以實現固定周期控制、多(duō)時段運行控制、特殊日控制、獨立感應控制、無電纜聯動控制、幹道綠波協調控制、聯網協調控制、公交優先、交通(tōng)管制等功能。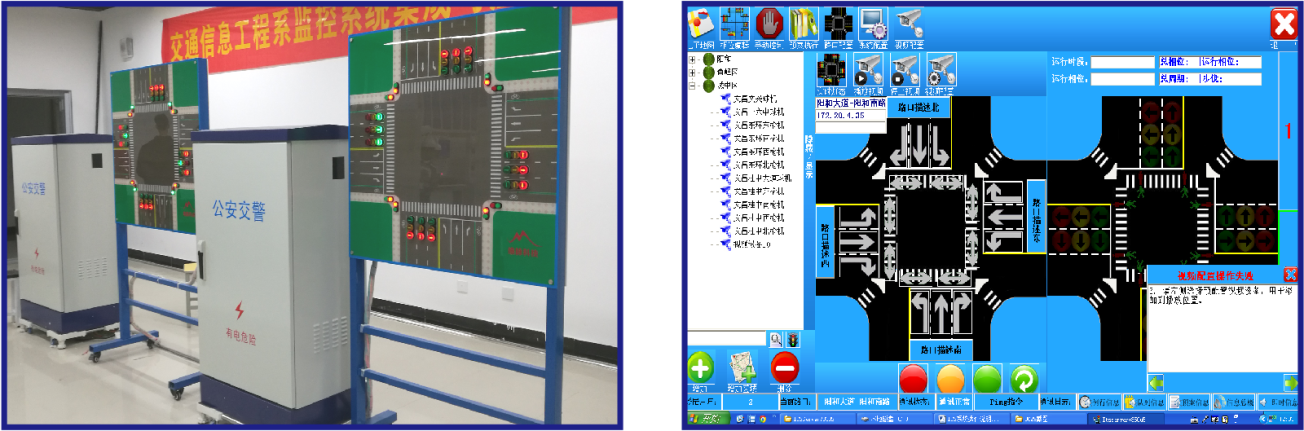
二、系統配置
本系統包括1套單路口交通(tōng)信号控制實驗平台、1套便攜式微波交通(tōng)數據采集系統和(hé)1套便攜式激光(guāng)交通(tōng)調查系統,系統爲一體化(huà)結構方式。
序号
設備名稱
數量
單位
1
交通(tōng)信号控制實驗平台
1
套
2
便攜式微波交通(tōng)數據采集系統
1
套
3
便攜式激光(guāng)交通(tōng)調查系統
1
套
(1)信号機性能指标:
交通(tōng)信号控制機以高(gāo)性能Cortex-M3技術的(de)ARM 32位微控制器爲核心,采用(yòng)模塊化(huà)設計,方便操作人(rén)員安裝和(hé)維護。采用(yòng)獨立的(de)微處理(lǐ)器完成可(kě)靠的(de)環形線圈檢測器系統;通(tōng)過靈活方便的(de)通(tōng)訊接口連接控制中心,進行系統協調控制;多(duō)種通(tōng)訊接口:RS-232串口、RJ45網口,特征參數生成和(hé)下(xià)載方便。
電源輸入具有防電網浪湧和(hé)抗雷擊措施;漏電保護功能;完善的(de)燈色沖突相位檢測;比較全面的(de)故障診斷功能使故障定位較爲容易。
采集功能:交通(tōng)流信息采集與處理(lǐ)的(de)功能。
存儲功能:存貯交通(tōng)流量等信息的(de)功能。
(2)信号機參數标準:
黃閃信号頻率爲55次/min-65次/min,其中信号亮暗時間比爲1:1。
鹵鎢燈光(guāng)源的(de)閃光(guāng)信号頻率允許降低,但不得(de)低于30次/min,亮暗比不大(dà)于1:1。
綠閃信号頻率、信号亮暗比同黃閃信号參數。
所有時間設定精度在±3%範圍内。
在控制方式轉換、配時方案變化(huà)時,信号機能夠實現平滑過度。
以上信号持續時間調節步長均爲1s。
最多(duō)能支持4塊相位驅動闆,16個獨立相位驅動,48個相位驅動端子。
最多(duō)32個機動車檢測器(線圈檢測器)。
最多(duō)8路行人(rén)按鈕。
電源:信号機電源額定電壓AC220V±44V,50Hz±2Hz,機櫃内安裝兩個标注AC 220V電源備用(yòng)插座。
驅動功率:信号機每路的(de)最大(dà)驅動功率爲800W。
整機功耗:信号機整機功耗爲<50W(不包括信号燈消耗)。
絕緣電阻:信号機絕緣電阻大(dà)于10MΩ。
耐壓:在電源電極或與電源電極相連的(de)其它導電電路和(hé)機櫃、安裝機箱等易觸及部件之間施加1500V、50Hz電壓,不出現擊穿現象。
電磁抗擾度:信号機在靜電放電、電快(kuài)速瞬變脈沖群、浪湧、電壓短時中斷等電磁騷擾環境下(xià)不出現電氣故障。
(3)仿真技術參數:
分(fēn)布式控制仿真功能:交通(tōng)信号控制仿真平台具備分(fēn)布式控制仿真功能,通(tōng)過網絡連接,可(kě)支持至少30台路口控制工作站(每台工作站可(kě)與仿真路網中30個路口分(fēn)别對應)同時與一台仿真軟件服務器進行信息交互,實現路口控制仿真。
數據交互功能:交通(tōng)信号控制仿真平台具備與仿真軟件進行數據交互的(de)功能,能夠下(xià)發交通(tōng)信号控制指令,接收流量、占有率、排隊長度等交通(tōng)檢測數據并進行分(fēn)析、驗證、顯示,可(kě)完成路口、幹線、路網多(duō)種交通(tōng)信号控制策略的(de)仿真驗證。
交通(tōng)信号控制功能:交通(tōng)信号控制仿真平台具備定時控制、感應控制、自适應控制,以及幹線綠波帶控制、路網自适應協調控制等算(suàn)法的(de)加載及仿真效果分(fēn)析功能,通(tōng)過不同控制方式的(de)操作界面,用(yòng)戶可(kě)分(fēn)别進行不同各種控制算(suàn)法的(de)選擇及控制指令下(xià)發,仿真軟件将按照(zhào)不同的(de)控制指令進行交通(tōng)仿真,并将交通(tōng)運行數據回傳到交通(tōng)信号控制仿真平台,該平台在接收到交通(tōng)運行數據後進行存儲,同時以圖形化(huà)的(de)形式實時展現,用(yòng)戶可(kě)直觀地查看及對比控制仿真效果。
綠波配時功能:交通(tōng)信号控制仿真平台具備幹線交通(tōng)綠波帶控制配時功能。爲用(yòng)戶提供綠波帶輔助設計模塊,通(tōng)過該模塊,用(yòng)戶可(kě)自由添加、删除幹線路口,通(tōng)過鼠标左右拖動配時條,可(kě)方便地修改路口間距離,使之與實際路口間距一緻;通(tōng)過鼠标上下(xià)拖動配時條,可(kě)自由調整路口正反向綠波以優化(huà)相位差。軟件提供配置界面,可(kě)調整不同路段平均行車速度,對應調整的(de)不同路段平均行車速度自動實現變速綠波帶的(de)配置。軟件提供配置界面,可(kě)通(tōng)過配置界面,可(kě)任意配置各個路口的(de)正反向綠波協調相位,便于實際應用(yòng),當設置的(de)協調相位發生變化(huà)後,軟件自動更新綠波帶寬。當進行綠波帶配置時,可(kě)同時顯示相應的(de)相位差,最終對配置好的(de)綠波帶會有相應的(de)相位差輸出。該平台能夠保存和(hé)重新加載配置好的(de)綠波帶文件,便于配置結果的(de)使用(yòng)及修改。平台會根據各路口流量大(dà)小、周期、綠信比等參數,自動計算(suàn)協調相位紅燈時排隊長度及紅燈排隊消散時間。
(4)信号燈闆參數
一體化(huà)結構設計,集成交通(tōng)信号控制實驗教學軟硬件功能。
工作溫度0-70℃,濕度 20%-90%。
具備RS232、RS485、CAN、USB2.0、以太網等通(tōng)訊接口。
具備16路開關量輸入。
具備能驅動最多(duō)32組紅黃綠LED燈能力。
(5)支持的(de)實驗内容
單路口定時信号配時設計實驗。
單路口感應控制信号配時設計實驗。
路段行人(rén)需求控制配時設計實驗。
無電纜協調信号控制配時設計實驗。
交通(tōng)信号檢測接入實驗。
信号機與燈組的(de)連接測試實驗。
信号機控制效果評價實驗。
信号機運行故障檢測實驗。
信号機聯網控制實驗。
2、便攜式微波交通(tōng)數據采集系統
便攜式微波交通(tōng)數據采集系統采用(yòng)最新一代的(de)24GHz雷達傳感器——4D/HD跟蹤雷達,向道路發射一束低功耗的(de)微波,并檢測它所覆蓋範圍内的(de)所有目标。其雷達原理(lǐ)能夠同時并實時的(de)測量所有反射目标的(de)位置、速度、和(hé)角度參數,并對每個物(wù)體進行跟蹤檢測,每秒檢測并可(kě)輸出13次數據。因此,在檢測區域内的(de)所有目标将被可(kě)靠的(de)檢測,并輸出精确的(de)數據。
(1)性能指标
用(yòng)于路口排隊長度,車輛到達信息,轉向流量,出口流量等數據的(de)采集。
精确測量每個目标的(de)位置(X,Y坐(zuò)标),以及速度分(fēn)量。
可(kě)同時跟蹤最多(duō)126個目标,可(kě)分(fēn)車型有:卡車,機動車,自行車,行人(rén)。
可(kě)同時檢測4條車道(或更多(duō)),檢測範圍最大(dà)可(kě)達120米。
高(gāo)精度測速,最高(gāo)車速可(kě)到300公裏/小時。
安裝方式靈活:可(kě)在路側便攜安裝,安裝高(gāo)度1.5 -10米,也(yě)可(kě)頂置安裝或固定安裝。
具有自标定和(hé)診斷功能,體積小,重量輕。
全天候工作,免維護,不受光(guāng)線,天氣條件影(yǐng)響。
(2)技術參數
傳感器類型:24GHz 4D/HD雷達傳感器。
車輛分(fēn)型:按信号反射強度分(fēn)型,可(kě)劃分(fēn)爲卡車、機動車、自行車、行人(rén)。
數據存儲:SD卡存儲,可(kě)存儲原始13Hz數據,同時具有時間段統計數據。
檢測範圍(标準版):行人(rén)檢測50米,機動車檢測120米。
方位角度:-20到+20度。
最小檢測範圍:1.5米。
目标定位精度:一般小于±2.5%,或小于 ±0.25米。
速度精度:一般小于±0.28米/秒,或小于 ±1%。
采樣頻率:13Hz。
同時跟蹤目标數量:最多(duō)126個。
通(tōng)訊連接:RJ45,RS232和(hé)WiFi無線連接,滿足各種通(tōng)訊要求。
安裝高(gāo)度:1.5-10米。
工作溫度:-40 至 +85℃。
電源:12VDC,5瓦。
3、便攜式激光(guāng)交通(tōng)調查系統
便攜式激光(guāng)交通(tōng)調查系統采用(yòng)路側激光(guāng)技術,用(yòng)于較爲複雜的(de)交通(tōng)流狀态路段,如多(duō)車道和(hé)經常有擁堵狀态的(de)路段數據采集,其優勢在于車輛的(de)分(fēn)型,該設備采用(yòng)非接觸方式安裝在路側,可(kě)檢測交通(tōng)流量、車速、車型等交通(tōng)參數,其車型按軸距劃分(fēn)。在交通(tōng)調查時,我們經常遇到同時調查多(duō)車道數據的(de)情況,如3-4條車道,而且還要考慮人(rén)員安全問題,緻使其它技術的(de)交調儀很難實現,而在這種情況下(xià),該設備便是您最佳的(de)選擇。非接觸式技術不需要在路上鋪設傳感器,從而增加了(le)人(rén)員的(de)安全,同時也(yě)不需要封閉道路。
(1)性能指标
适用(yòng)于較大(dà)交通(tōng)量路段交通(tōng)流數據的(de)采集。
可(kě)同時檢測4-5條車道的(de)交通(tōng)流數據。
按軸距分(fēn)型可(kě)劃分(fēn)13種車型。
路側安裝,安裝在路沿石前面。
(2)技術參數
工作原理(lǐ):采用(yòng)10KHz的(de)高(gāo)頻激光(guāng)掃描技術。
車輛分(fēn)型:按軸距分(fēn)型,可(kě)劃分(fēn)13種車型以上,并配有中國車輛分(fēn)型方案。
數據存儲:原始時間标存儲方式,獲得(de)單車數據,最多(duō)可(kě)同時檢測4-5條車道。
統計數據:流量、車速、車型、軸距、車頭時距和(hé)時間間距等。
數據存儲容量:32G SD卡。
速度範圍:3~200公裏/小時。
車輛計數準确率:流量精度 >99.0%,車速在10~200公裏/小時範圍内>95.0%,車速小于3公裏/小時的(de)車輛被認爲是停止車輛。
内置電池:用(yòng)戶可(kě)更換12V免維護可(kě)充電電池。
電池壽命:内置電池,25℃連續運行模式下(xià)使用(yòng)約6小時。
時間分(fēn)辨能力:優于1ms。
儲存溫度:-20℃~70℃。
工作溫度:-10℃~60℃極值溫度下(xià)會降低電池壽命。
工作濕度:0~90% 無冷(lěng)凝時間分(fēn)辨能力:優于1ms。
相關産品
