ZY-IRH02型 焊接工業機器人(rén)實訓系統
一、機器人(rén)焊接系統功能目标
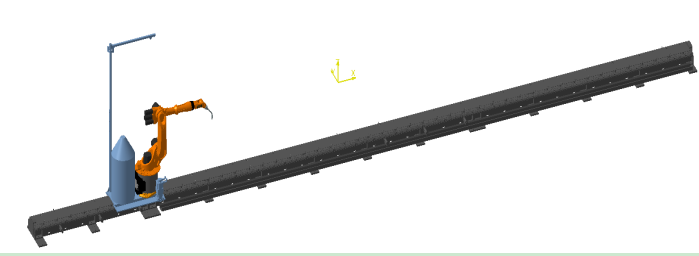
1、機器人(rén)、送絲桶、送絲機及清槍減絲機構安裝在導軌上,控制櫃和(hé)焊接電源集成于一個吊籃内。2、機器人(rén)焊接系統執行焊接任務時,首先将機器人(rén)及導軌底座整體吊裝至焊縫一側,同時将另一段導軌底座吊裝,兩段導軌底座采用(yòng)螺栓連接,使機器人(rén)行走距離達到13m。導軌底座與焊縫平行并保持一定距離,通(tōng)過螺栓調節導軌底座的(de)水(shuǐ)平度,利用(yòng)眼闆将導軌底座固定。3、将控制櫃和(hé)焊接電源所在的(de)吊籃吊裝至方便工作人(rén)員操作的(de)位置。連接機器人(rén)、控制櫃和(hé)焊接電源的(de)控制電纜。4、操作人(rén)員通(tōng)過示教盒使機器人(rén)移動至焊縫起始點附近,調用(yòng)通(tōng)過離線編程軟件編寫的(de)軌迹預掃命令,機器人(rén)連同3D激光(guāng)器對焊縫進行預掃描,記錄焊縫的(de)實際坐(zuò)标位置。5、焊縫預掃描結束,機器人(rén)回到焊縫起始點附近,調用(yòng)通(tōng)過離線編程軟件編寫的(de)焊接命令,機器人(rén)對起始點自動尋位,焊接開始,通(tōng)過電弧跟蹤以及3D激光(guāng)器的(de)在線實時跟蹤功能,保證焊縫的(de)焊接質量。由于工件較厚、焊縫較長,選用(yòng)額定電流≥500A的(de)水(shuǐ)冷(lěng)焊接電源及水(shuǐ)冷(lěng)焊槍保證焊機工作的(de)連續性。在機器人(rén)末端配置碰撞傳感器,保護3D激光(guāng)器及焊槍。6、焊接時,空壓機工作,爲清槍減絲機構提供壓縮空氣。第一道焊接結束,機器人(rén)自動清槍減絲,爲工件多(duō)層多(duō)道焊的(de)下(xià)道焊接做(zuò)準備。7、爲保證焊接作業環境的(de)安全,實驗室配備綜合報警裝置,實現對實驗室漏水(shuǐ)、漏電、火災等危險狀态的(de)及時報警。二、系統功能要求1、機器人(rén)系統:具有6自由度、支持外部擴展軸,較大(dà)的(de)水(shuǐ)平動作半徑以滿足不同類型焊縫的(de)焊接;具備防碰撞功能;控制櫃具有自動控制、檢測、保護、報警等功能,具備實現多(duō)層多(duō)道焊的(de)軟硬件。2、焊接系統:水(shuǐ)冷(lěng)焊接電源電流*高(gāo)達到500A、額定暫載率≥60%,支持CO2/MAG/MIG焊接;送絲機構與焊接電源配套;防碰撞水(shuǐ)冷(lěng)焊槍;自動清槍剪絲站;控制櫃和(hé)焊接電源需集成在一起,以便于整體吊裝。3、跟蹤系統:具備激光(guāng)在線/離線3D跟蹤功能;具備自動尋位、電弧跟蹤功能。4、行走系統:滿足機器人(rén)行走距離13m;導軌底座需參考我院提供的(de)基本樣式分(fēn)爲兩段制作,并滿足在鋼結構上快(kuài)速定位的(de)需求;兩段導軌底座能夠實現拼接,并保證機器人(rén)的(de)正常行走;導軌底座還需設置吊裝眼闆,保證當機器人(rén)固定在導軌底座上時的(de)整體結構強度;供應商需提供焊接機器人(rén)靜置、行走以及擺動焊接狀态下(xià)的(de)導軌底座應力應變有限元分(fēn)析報告。5、保障系統:配備空壓機爲清槍機構提供壓縮空氣,安裝實驗室綜合報警裝置,實現對實驗室漏水(shuǐ)、漏電、火災等危險狀态的(de)及時報警。
三、設備技術參數要求
| 系統名稱 |
要求 |
| 機器人(rén)系統 |
含機器人(rén)本體、控制櫃、示教盒、控制電纜等。
機器人(rén)本體:6軸,有效負荷≥6kg,重複精确度±0.08mm範圍内,機器人(rén)*大(dà)動作半徑範圍在水(shuǐ)平方向≥1900mm,重量≤300kg;整個機器人(rén)系統内置碰撞傳感器,出現碰撞後立刻停止工作。
控制櫃:具有自動控制、檢測、保護、報警等功能;具備多(duō)層多(duō)道焊軟件。
示教盒:菜單式中英文雙語。
控制電纜:長度≥20m。 |
| |
| 焊接系統 |
含焊接電源、送絲機、焊槍、清槍剪絲站等裝置。
焊接電源:進口水(shuǐ)冷(lěng)焊接電源一套,支持CO2/MIG/MAG焊接,*大(dà)電流500A,額定暫載率≥60%。
送絲機:與焊接電源配套,性能穩定。
焊槍:防碰撞水(shuǐ)冷(lěng)焊槍。
清槍剪絲站:自動清槍、剪絲。 |
| 跟蹤系統 |
含3D激光(guāng)器、電弧跟蹤、自動尋位等裝置。
3D激光(guāng)器:激光(guāng)器與機器人(rén)集成,具有焊接在線跟蹤、離線焊縫軌迹識别功能;
電弧跟蹤:具有電弧跟蹤功能。
自動尋位:具有起始點尋位功能。 |
| 保障系統 |
含空壓機、綜合報警等裝置。
空壓機:空壓機爲清槍機構提供壓縮空氣。
綜合報警裝置:安裝實驗室綜合報警裝置,實現對實驗室漏水(shuǐ)、漏電、火災等危險狀态的(de)及時報警。 |
| 行走系統 |
含底座、導軌等裝置。
底座:至少包含一個擴展軸,含伺服電機和(hé)減速機;底座上預留送絲桶安裝平台。
導軌:滿足機器人(rén)行走距離13m;導軌底座需參考我院提供的(de)基本樣式分(fēn)爲兩段制作,并滿足在鋼結構上快(kuài)速定位的(de)需求;兩段導軌底座能夠實現拼接,并保證機器人(rén)的(de)正常行走;導軌底座還需設置吊裝眼闆,保證當機器人(rén)固定在導軌底座上時的(de)整體結構強度;供應商需提供焊接機器人(rén)靜置、行走以及擺動焊接狀态下(xià)的(de)導軌底座應力應變有限元分(fēn)析報告。 |
| 售後服務 |
提供運輸、安裝調試、人(rén)員培訓等服務。
提供不少于2人(rén)的(de)焊接機器人(rén)操作及離線編程軟件培訓,每人(rén)培訓學時≥80小時,并提供相關培訓資料;
設備保修期限≥1年(從安裝調試正常使用(yòng)後開始計算(suàn))。 |
四、機器人(rén)焊接系統主要設備配置:
| 系統名稱 |
主要設備 |
品牌 |
型号 |
參數 |
數量 |
| 機器人(rén)系統 |
機器人(rén)本體 |
KUKA |
KR 16L6-2 |
負載6KG;*大(dà)工作範圍1911mm;軸數:6;重複定位精度:±0.05mm; |
1套 |
| 控制櫃 |
KUKA |
KRC4 |
多(duō)層多(duō)道焊軟件包:KUKA.Multilayer;
與3D傳感器配合實現焊接在線跟蹤、離線焊縫軌迹識别功能的(de)軟件包:KUKA.seamtech.finding以及KUKA.seamtech.tracking |
1套 |
| 示教盒 |
KUKA |
smartPAD |
配合庫卡機器人(rén)使用(yòng) |
1套 |
| 控制電纜 |
KUKA |
180184 |
≥20米 |
1套 |
| 機器人(rén)離線編程軟件 |
KUKA |
SIM PRO |
離線仿真模拟 |
1套 |
| 防碰撞傳感器 |
TBI |
KS-2 |
外置式;全機械式;彈簧支撐;*大(dà)扭曲角度:10°; |
1套 |
| 焊接系統 |
焊接電源 |
EWM |
Phoenix 551 |
數字化(huà)逆變,焊接電流5-550A,暫載率550A/60%,重量125kg |
1套 |
| 送絲裝置 |
EWM |
配套 |
自動送絲 |
1套 |
| 焊槍 |
賓采爾 |
ABIROB W500 |
額定電流500A |
1套 |
| 清槍剪絲機構 |
TBI |
BRG-2000D |
自動清槍、剪絲 |
1套 |
| 水(shuǐ)冷(lěng)裝置 |
國産 |
國内配套 |
滿足水(shuǐ)冷(lěng)要求 |
1套 |
| 跟蹤系統 |
3D激光(guāng)器 |
SERVO-ROBOT |
POWER-TRAC |
配備POWER-CAM傳感器,含高(gāo)級接頭處理(lǐ)軟件模塊,Trac-3D軌迹生成模塊,具備焊接在線跟蹤、離線焊縫軌迹識别功能;用(yòng)于Power Cam激光(guāng)傳感器的(de)可(kě)替換保護鏡片25片; |
1套 |
| 自動尋位 |
KUKA |
Touchsense |
軟件:具備自動尋位功能 |
1套 |
| 電弧跟蹤 |
KUKA |
Arcsense |
軟件:具備電弧跟蹤功能 |
1套 |
| 保障系統 |
空壓機 |
飛豹 |
FBV-0.17-8 |
排氣壓力:0.8MPa;功率:1.5KW;排氣量:0.17m3/min |
1套 |
| 綜合報警裝置 |
斯必得(de) |
SPD-T58GSM |
對實驗室漏水(shuǐ)、停電、火災等危險狀态的(de)及時報警 |
1套 |
| 行走系統 |
伺服電機 |
安川 |
外軸配套 |
7系列,位置控制,AC供電≥1000W |
1套 |
| 導軌底座 |
隆深 |
LS-DG-013 |
總長13米,(6.5+6.5或者6+7),參考江蘇科技大(dà)學提供的(de)形式,工作或吊裝時滿足強度要求;導軌底座上設置吊裝眼闆,并配置用(yòng)于導軌底座和(hé)機器人(rén)吊裝的(de)吊籠;提供用(yòng)于裝載焊接電源和(hé)控制櫃的(de)吊籃,滿足移動和(hé)吊裝的(de)功能要求。 |
1套 |
| 減速機 |
隆深 |
外軸配套 |
配合安川伺機使用(yòng) |
1套 |
五、機器人(rén)系統設備介紹
機器人(rén)系統主要由機器人(rén)本體、控制櫃、示教盒、控制電纜等組成。
1、KUKA KR 16 L6-2機器人(rén)技術參數:
| 型号 |
負荷 |
軸數 |
*大(dà)作用(yòng)範圍 |
重複精确度 |
重量 |
安裝位置 |
| KR 16 L6-2 |
6kg |
6 |
1911mm |
±0.05mm |
240kg |
地面、天花闆 |
KR C4的(de)革新理(lǐ)念爲自動化(huà)的(de)明(míng)天打下(xià)了(le)堅實的(de)基礎。降低了(le)自動化(huà)方面的(de)集成、保養和(hé)維護成本,并且同時持久地提高(gāo)系統的(de)效率和(hé)靈活性。所以庫卡開發了(le)一個全新的(de)、結構清晰且注重使用(yòng)開放高(gāo)效數據标準的(de)系統架構。這個系統架構中集成的(de)所有安全控制(SafetyControl)、機器人(rén)控制(RobotControl)、運動控制(MotionControl)、邏輯控制(LogicControl)均擁有相同的(de)數據基礎和(hé)基礎設施并可(kě)以對其進行智能化(huà)使用(yòng)和(hé)分(fēn)享,使系統具有*高(gāo)性能、可(kě)升級性和(hé)靈活性。引領時代、開創未來—而且并不僅限于庫卡機器人(rén)。2、KR C4功能特征:(1)計劃、操作和(hé)維護更簡單(2)繼續采用(yòng)曆經驗證的(de)基于計算(suàn)機的(de)控制技術(3)通(tōng)過繼續采用(yòng)已有标準實現快(kuài)速和(hé)簡捷的(de)操作(4)擴展的(de)指令集便于更具用(yòng)戶友好性的(de)軌迹編程(5)與現有的(de)KR C2程序高(gāo)度兼容(6)安全控制、機器人(rén)控制、邏輯控制、運動控制和(hé)工藝流程控制集成于一套控制系統中(7)專用(yòng)控制模塊之間能進行實時通(tōng)信(8)通(tōng)過中央基礎服務系統實現了(le)*大(dà)化(huà)的(de)數據一緻性(9)無縫集成的(de)針對全新應用(yòng)領域的(de)安全技術(10)集成軟件防火牆,網絡更加安全(11)創新的(de)軟件功能,能源效率得(de)以*優化(huà)(12)适合未來發展、無專用(yòng)硬件的(de)技術平台(13)多(duō)核處理(lǐ)器支持,性能更具可(kě)升級性(14)利用(yòng)千兆以太網的(de)快(kuài)速通(tōng)信(15)一體化(huà)集成存儲卡,儲存重要系統數據(16)專爲380-480VAC設計(17)優化(huà)能源效率的(de)全新風扇設計(18)冷(lěng)卻裝置無需保養且不帶濾氈(19)在*小的(de)空間内實現*大(dà)化(huà)的(de)性能(20)*大(dà)化(huà)的(de)可(kě)用(yòng)性3、smartPAD功能特征: smartPAD觸摸屏、圖形輔助、靈活互動。機器人(rén)的(de)功能越強大(dà),直觀感知式機器人(rén)操作界面就越重要。新型KUKA smartPAD在超大(dà)高(gāo)清無反射觸摸屏上以*佳的(de)效果顯示出如何直觀地操控機器人(rén)。智能交互式對話窗(chuāng)口向用(yòng)戶清晰地展示各項流程。在任何時刻都會爲用(yòng)戶提供其在那一時刻正好需要的(de)操作元件。其目的(de)是将用(yòng)戶的(de)注意力吸引到*重要的(de)因素上,以便其能夠直觀、簡單、快(kuài)速并有效地工作。真正實現全面智能。
(1)觸控闆擁有上下(xià)文敏感的(de)浮動窗(chuāng)口,使得(de)操作更直觀(2)通(tōng)過單獨的(de)運行鍵直接控制八根軸/附加軸,無需來回切換(3)使用(yòng)6D鼠标進行高(gāo)效編程,并且觸控闆上帶有基于人(rén)機工程學設計的(de)鍵盤(4)堅定不移地繼續發展了(le)庫卡久經考驗的(de)操作和(hé)編程方案(5)無培訓成本(6)可(kě)直接在smartPAD 上儲存和(hé)讀取配置(7)熱插拔功能。如果不需要使用(yòng)smartPAD,可(kě)以直接拔掉(8)工作期間,高(gāo)清、超大(dà)、防反射的(de)顯示屏可(kě)以保護眼睛
六、焊接系統設備介紹
焊接裝置主要由焊接電源、焊槍、送絲機構、清槍剪絲機構、防碰撞傳感器、水(shuǐ)冷(lěng)裝置等組成,焊接裝置服務于焊接機器人(rén),兩者之間通(tōng)過總線進行通(tōng)訊,可(kě)選配以太網、InterBus、Profibus、DeviceNet等主流通(tōng)訊方式。焊接機器人(rén)與清槍剪絲機構之間通(tōng)過I/O直接通(tōng)訊,可(kě)實現清槍、剪絲流程的(de)自動化(huà)。
德國EWM Phoenix 551 Puls逆變分(fēn)體式焊接電源是全數字化(huà)逆變焊接電源,其工作效率高(gāo),飛濺小,可(kě)重複性強;EWM—forceArc技術讓電弧能量更集中,焊接厚闆的(de)效率提高(gāo)30%;一目了(le)然的(de)操作面闆适合各種應用(yòng);優化(huà)的(de)預設焊接任務(JOBs)和(hé)一元化(huà)操作系統使您工作得(de)心應手;移動性強:大(dà)尺寸腳輪,機身窄,适合通(tōng)過标準性門,便于裝卸;焊機前部的(de)立杆既可(kě)以作把手,也(yě)能保護焊機免受碰撞;出色的(de)外殼設計使得(de)冷(lěng)卻系統效果顯著,防塵能力強;PROGRESS, EXPERT面闆:支持自動化(huà)通(tōng)信接口,可(kě)方便将焊接電源整合到機器人(rén),工業總線及自動化(huà)生産線中;極佳的(de)焊槍冷(lěng)卻系統,離心泵、12升的(de)超大(dà)水(shuǐ)箱。1、德國EWM Phoenix 551 Puls逆變分(fēn)體式焊接電源應用(yòng)領域:(1)非合金鋼、低合金鋼、高(gāo)合金鋼、鋁合金、銅及銅合金、特殊金屬。(2)實芯和(hé)藥芯焊絲(0.8-2.4mm),钛型和(hé)堿性焊條。(3)化(huà)學和(hé)食品行業、機械制造、車輛制造、管道建設、容器、高(gāo)壓容器、造船業、海上作業等。2、德國EWM Phoenix 551 Puls逆變分(fēn)體式焊接電源特征:(1)多(duō)功能直流逆變焊接電源可(kě)用(yòng)于MIG/MAG脈沖焊、TIG常規焊、TIG接觸引弧和(hé)MMA。(2)可(kě)移動,空冷(lěng)或者水(shuǐ)冷(lěng),獨立的(de)送絲機構、可(kě)以用(yòng)起重機搬移,5米的(de)電源線。(3)強有力的(de)溫度控制風扇。(4)冷(lěng)卻液壓力監測系統、溫度控制式水(shuǐ)泵和(hé)冷(lěng)卻風扇。(5)PHOENIX DRIVE 4輪驅動(标配1.0+1.2mm鋼性送絲輪)37mm,配置歐式接口或Dinse接口。(6)100%實際焊接檢驗。3、德國EWM Phoenix 551 Puls逆變分(fēn)體式焊接電源技術參數:
| 型号 |
焊接電流 |
暫載率MIG/MAG |
尺寸 |
重量 |
| 40°C |
25°C |
| EWM Phoenix 551 Puls |
5A-550A |
550A/60%
420A/100% |
550A/60%
450A/100% |
1100 x 455 x 1000mm |
125kg |
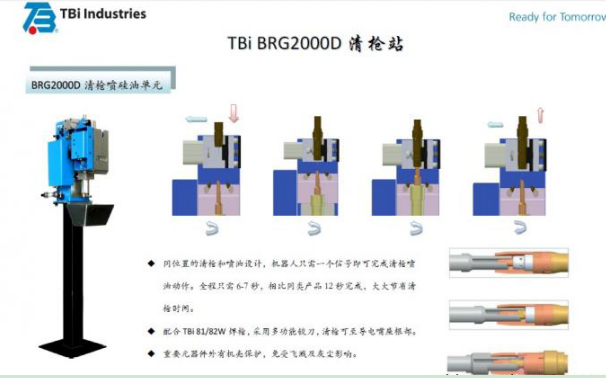
圖1.6 TBi BRG-2000D清槍站
4、德國TBi BRG-2000D清槍剪絲機構特點:(1)德國TBi BRG-2000D清槍剪絲機構同位置的(de)清槍和(hé)噴油設計,機器人(rén)隻需要一個信号就可(kě)以完成清槍噴油動作。(2)德國TBi BRG-2000D清槍剪絲機構清槍全程隻需6-7秒,相比其它同類産品12秒完成,大(dà)大(dà)節約的(de)機器人(rén)清槍時間,更高(gāo)的(de)提高(gāo)機器人(rén)的(de)工作效率。(3)德國TBi BRG-2000D清槍剪絲機構重要元器件都有高(gāo)質量機殼保護,免受碰撞飛濺及灰塵影(yǐng)響。(4)德國TBi BRG-2000D新型清槍站内置式噴油裝置由機器人(rén)通(tōng)過電磁閥控制(光(guāng)電感應噴油可(kě)選,一節約機器人(rén)信号)安全可(kě)靠維護。霧化(huà)防飛濺劑可(kě)以很好地到達焊槍槍頭根部,同時相對封閉的(de)噴油倉大(dà)大(dà)減輕了(le)設計中的(de)油霧污染問題。(5)德國TBi BRG-2000D剪絲裝置采用(yòng)電磁閥控制,剪絲更加準确。同時新型安全防護機罩結構緊湊,确保剪掉的(de)焊絲落入收集盒,避免二次污染。(6)德國TBi BRG-2000D剪絲裝置和(hé)其它品牌産品相比,電氣布置非常簡單,所有控制元件都安全放置在機箱内,外露管線非常少。5、德國TBi BRG-2000D清槍減絲機構技術參數:
| 型号 |
TBi BRG2000D |
| 氣源 |
無油幹燥壓縮空氣,6bar |
| 氣流量 |
大(dà)約7L/s |
| 啓動信号 |
24V DC |
| 清槍時間 |
約4-5S |
| 噴矽油裝置 |
吸油器300ml |
| 尺寸 |
34.5x24.0x16.25cm |
| 重量 |
約13kg(不含清槍站底座) |
七、跟蹤系統設備介紹
1、POWER-TRAC特點:
| 硬件 |
視覺 |
軟件 |
● 全套标準系統包括光(guāng)傳感器、控制單元和(hé)軟件。
● 非常堅固的(de)傳感器外殼,帶有冷(lěng)卻通(tōng)道。
● 壓縮空氣流噴嘴設計,保護可(kě)更換鏡片,抵抗煙塵與飛濺。
● 保護鏡片自動探測。
● 非常緊湊的(de)控制單元。 |
● 焊槍軌迹實時控制。
● 不受電弧環境幹擾(飛濺、熱、煙塵、磁場、沖擊和(hé)振動)。
● 不受環境照(zhào)明(míng)條件影(yǐng)響。
● 能夠在所有可(kě)焊的(de)材料上實現跟蹤。
● 接頭幾何尺寸真實3D激光(guāng)測量。
● 豐富的(de)焊縫接頭數據庫可(kě)用(yòng)于所有類型焊縫的(de)跟蹤、尋位和(hé)測量。
● 高(gāo)速數字激光(guāng)傳感器實現快(kuài)速和(hé)可(kě)靠的(de)接頭識别。
● 自動接頭識别。 |
● 自适應焊接軟件包,補償接頭變化(huà)。
● 高(gāo)級接頭算(suàn)法滿足各種可(kě)能的(de)焊縫接頭。
● 過程監控顯示過程是否受控。 |
與所有的(de)焊接工藝兼容:
● GMAW(可(kě)選适用(yòng)于雙絲焊接的(de)超級強力保護)
● GTAW(可(kě)選高(gāo)頻保護)
● FCAW(可(kě)選超級強力保護)
● 激光(guāng)複合焊(可(kě)選高(gāo)精度激光(guāng)傳感器型号)
● 激光(guāng)焊(可(kě)選高(gāo)精度/長離開距離的(de)激光(guāng)傳感器型号) |
可(kě)選項和(hé)附件
● 接地故障探測器保護視覺系統免受因意外接觸到工件而受到焊接電流的(de)損壞。
● 安全互鎖I/O已集成到控制單元内部,便于機器人(rén)單元的(de)使用(yòng)。
● 超級強力傳感器保護組件(SHDCK)是一個用(yòng)于高(gāo)強度焊接工藝的(de)可(kě)選項(帶有可(kě)選的(de)氣刀(dāo)噴嘴)。 |
高(gāo)級特征
● “即插即焊”概念,通(tōng)過預置标定實現簡單快(kuài)速的(de)激光(guāng)傳感器更換
● 自動激光(guāng)功率控制
● 焊接過程中自動光(guāng)學調整,易于使用(yòng)
● 保護鏡片未安裝時自動關閉激光(guāng)
● 采用(yòng)精密标定塊,實現傳感器與工具的(de)自動标定
● 可(kě)編程激光(guāng)傳感器視場範圍
● 直接數字接口連接到大(dà)多(duō)數的(de)焊接機器人(rén)
● 通(tōng)過以太網HMI連接實現遠程診斷與服務
● 将離線焊縫尋位、在線實時焊縫跟蹤及焊前與/或焊後檢測整合于一個系統中 |
獨有功能
● 高(gāo)性價比,兼有智能的(de)解決方案
● 系統組件尺寸減小,易于在機器人(rén)單元内集成
● 可(kě)用(yòng)于高(gāo)速焊接過程的(de)焊縫跟蹤,如雙絲氣保焊和(hé)激光(guāng)複合焊
● 自适應焊接模塊,應對接頭幾何尺寸變化(huà),優化(huà)焊縫尺寸,從而消除焊接缺陷和(hé)減少過量焊接
● 保證焊絲精确對準焊縫,提高(gāo)焊接過程穩定性,從而減少飛濺并提高(gāo)焊接質量 |
八、保障系統設備介紹
保護系統包含空壓機和(hé)綜合報警裝置兩部分(fēn)。
1、空壓内參數
| 品牌 |
型号 |
功率 |
冷(lěng)卻方式 |
排氣量 |
排氣壓力 |
| 飛豹 |
V-0.17-8 |
1.5KW |
風冷(lěng) |
0.17m3/min |
0.8MPa |
2、SPD-T58GSM四大(dà)特點:(1)功能齊全 溫度監控、濕度監控、漏水(shuǐ)監控、UPS電壓監控、空調遠程控制,空調來電自啓。(2)結構簡單 積木(mù)式結構:一個主控器+若幹傳感器,可(kě)針對自身情況對不需要的(de)功能進行舍棄,減少不必要的(de)花費。(3)性能穩定 采用(yòng)進口32位工業級微控制芯片,工作穩定可(kě)靠。(4)安裝簡單 獨創積木(mù)式結構,把傳感器插入相應的(de)控制器接口即可(kě)。設置報警溫度等操作均可(kě)通(tōng)過手機鍵盤遠程設置。
九、行走系統設備介紹
行走系統長度13米,導軌底座分(fēn)爲兩段制作,滿足在鋼結構上快(kuài)速定位的(de)需求;兩段導軌底座能夠實現拼接,并保證機器人(rén)的(de)正常行走;至少包含一個擴展軸,含伺服電機和(hé)減速機;底座上預留送絲桶安裝平台,導軌底座設置吊裝眼闆,當機器人(rén)固定在導軌底座上時,保證導軌底座吊裝時的(de)整體結構強度;配置用(yòng)于導軌底座和(hé)機器人(rén)吊裝的(de)吊籠,該吊籠能夠将機器人(rén)罩住;提供用(yòng)于裝載焊接電源和(hé)控制櫃的(de)吊籃,滿足移動和(hé)吊裝的(de)功能要求。
相關産品