ZYJ-WZQ01型 工業機器人(rén)智能控制算(suàn)法開發裝置(五子棋人(rén)機對弈)
ZYJ-WZQ01型 工業機器人(rén)智能控制算(suàn)法開發裝置(五子棋人(rén)機對弈)系統是以控制軟件爲核心,以六自由度工業機器人(rén)及機器視覺爲基礎的(de)智能下(xià)棋機器人(rén)系統。該機器人(rén)利用(yòng)視覺識别及人(rén)工智能技術實現下(xià)棋。在下(xià)棋過程利用(yòng)視覺系統采集信息,運用(yòng)數據庫分(fēn)析軟件制定*優算(suàn)法,對機械臂實現位置執行控制,提高(gāo)下(xià)棋精度。工業機器人(rén)的(de)快(kuài)捷性保證了(le)下(xià)棋過程的(de)感官享受,該作品緻力于将五子模機器人(rén)小型化(huà)及智能化(huà),以嵌入式智能平台爲支撐,靈活控制機械手臂,實現真正意義上的(de)人(rén)機對弈,綜合成本較低将使其适用(yòng)于大(dà)衆消費。
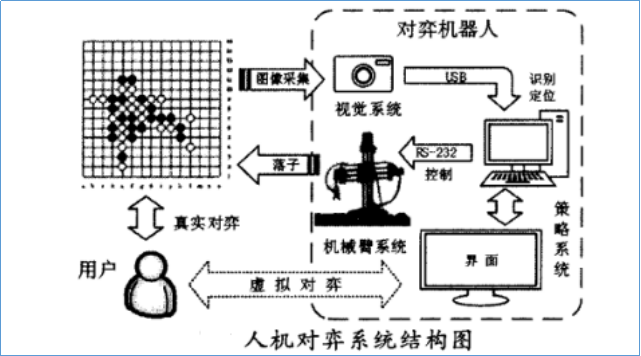
五子棋人(rén)機對弈系統主要包括視覺系統、策略系統和(hé)機器人(rén)系統三大(dà)功能模塊。機器人(rén)通(tōng)過攝像頭實時捕捉棋子的(de)位置變動,得(de)到對手的(de)出招,然後輸入到五子棋算(suàn)法中得(de)到應招,之後通(tōng)過控制機器人(rén)來完成棋子的(de)定位和(hé)控制氣缸完成吸放動作,從而實現了(le)真正意義上的(de)人(rén)機對弈。
視覺系統對棋盤進行圖像采集,通(tōng)過特定的(de)圖像識别算(suàn)法對雙方棋子進行識别與定位,得(de)到當前的(de)棋盤布局;策略系統對當前棋盤布局進行分(fēn)析,調用(yòng)智能對弈算(suàn)法計算(suàn)出*優落子位置坐(zuò)标,換算(suàn)成執行器的(de)動作量并發送至機器人(rén)系統,由其完成取子、移動、落子等運動控制,從而在真實的(de)棋盤上實現人(rén)機對弈。策略系統提供可(kě)視化(huà)的(de)人(rén)機界面,能将視覺系統得(de)到的(de)棋盤布局圖形化(huà)顯現,實現對弈過程中界面與棋盤信息的(de)同步。此外,用(yòng)戶亦可(kě)通(tōng)過人(rén)機界面與策略系統進行純軟件的(de)虛拟對弈,增強了(le)趣味性,豐富了(le)實驗内容。
 一、裝置組成
一、裝置組成
智能機器人(rén)智能控制算(suàn)法開發裝置(五子棋人(rén)機對弈)由工業機器人(rén)、視覺識别系統、AI智能算(suàn)法軟件、運行處理(lǐ)器、人(rén)機對弈工作台組成。
二、主要實驗項目
1.工業機器人(rén)編程操作
2.工業機器人(rén)與軟件通(tōng)訊應用(yòng)
3.工業機器人(rén)複雜路徑算(suàn)法開發應用(yòng)
4.視覺識别應用(yòng)
5.工業視覺系統通(tōng)訊應用(yòng)
6.視覺識别的(de)智能算(suàn)法開發應用(yòng)