ZY-IGZ06型 機電一體化(huà)綜合實訓考核設備
ZY-IGZ06型 機電一體化(huà)綜合實訓考核設備由顆粒上料工作站、加蓋擰蓋工作站、檢測分(fēn)揀工作站、工業機器人(rén)包裝工作站、成品自動入庫工作站組成,包括了(le)智能裝配生産系統、自動包裝系統、自動化(huà)立體倉庫及智能入庫系統、自動檢測機質量控制系統、生産過程數據采集及控制系統等,是一個完整的(de)智能工廠模拟裝置,應用(yòng)了(le)工業機器人(rén)技術、PLC控制技術、步進控制技術、伺服控制技術、工業傳感器技術、電機驅動技術等工業自動化(huà)相關技術,可(kě)實現空瓶自動上料、顆粒物(wù)料多(duō)樣上料、物(wù)料自動分(fēn)揀、顆粒可(kě)選填裝、自動加蓋、自動擰蓋、成品檢測、成品分(fēn)揀、機器人(rén)抓取入盒、盒蓋包裝、自動入庫等智能生産全過程。
一、顆粒上料單元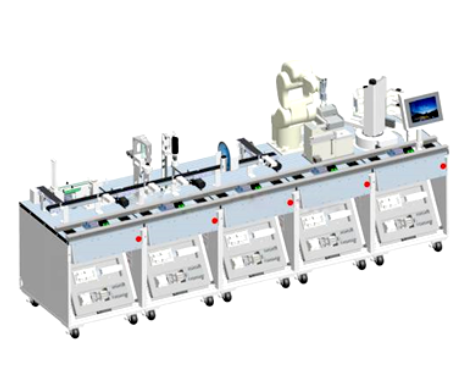
技術參數:
1. 工作台尺寸:單站尺寸::600mm×720mm×780mm±20mm
2. 桌體采用(yòng)§1.5mm厚的(de)優質鋼闆
3. 桌面采用(yòng)20×60mm鋁型材拼接成型
4. 銜接縫隙≤3mm
5. 皮帶寬度≥8mm
6. 顆粒上料單元由工作實訓平台、物(wù)料筒、物(wù)料傳輸皮帶、料瓶上料皮帶、物(wù)料分(fēn)揀皮帶、灌裝機構等部分(fēn)組成
7. 顆粒上料單元能實現物(wù)料瓶的(de)自動上料、物(wù)料顆粒的(de)自動分(fēn)揀及灌裝處理(lǐ)
8. 工作實訓平台采用(yòng)鋼鋁結構。尺寸:600mm×720mm×780mm±20mm
9. 桌體采用(yòng)§1.5mm厚的(de)鋼闆做(zuò)骨架
10. 桌面采用(yòng)20×60mm鋁型材拼接成型
11. 桌面可(kě)根據執行機構的(de)聯機情況随意調整安裝位置
12. 物(wù)料傳輸皮帶由支撐座、橫杆、傳動裝置、過渡裝置、驅動電機及護欄組成
13. 傳輸皮帶采用(yòng)兩級過渡,相鄰皮帶間擴展拼接後銜接縫隙≤3mm
14. 支撐座采用(yòng)鋁材加工
15. 物(wù)料分(fēn)揀皮帶由支撐座、橫杆、傳動裝置、過渡裝置、逆向切換裝置、驅動電機及護欄組成,可(kě)實現物(wù)料顆粒的(de)自動循環上料
16. 灌裝機構由旋轉氣缸、雙軸升降氣缸、真空吸盤及其聯動機構組成
17. 将分(fēn)揀完成的(de)物(wù)料由分(fēn)揀皮帶搬運至物(wù)料瓶
18. 控制系統布置于萬能網孔控制闆或桌面平台上
19. 配置有相當于或優于西門子 SMART SR40 / ST40 /SR60系統
20. 控制要求配套的(de)低壓控制器件
21. 低壓控制器件采用(yòng)相當于或優于施耐德等國際品牌産品
22. 控制面闆采用(yòng)優質PVC内置電路“模組式”設計
23. 控制按鈕采用(yòng)輕觸式按鍵設計
24. 設置有中英文“啓動、停止、運行、單機、聯機、急停”等控制功能
二、加蓋擰蓋單元
技術參數:
1. 工作台尺寸:單站尺寸:≥600mm×720mm×780mm
2. 桌面采用(yòng)20×60mm專業鋁型材
3. 加蓋擰蓋單元由工作實訓平台、加蓋執行機構、擰蓋執行機構、物(wù)料傳輸皮帶等部分(fēn)組成
4. 加蓋擰蓋單元能實現将灌裝好的(de)料瓶進行加蓋及擰緊處理(lǐ)
5. 工作實訓平台采用(yòng)鋼鋁結構
6. 桌體采用(yòng)1.5mm厚的(de)鋼闆做(zuò)骨架
7. 機械加工成型,外表面噴塗彩色環氧聚塑
8. 桌面采用(yòng)20×60mm鋁型材拼接成型
9. 可(kě)随意調整安裝位置
10. 加蓋機構由物(wù)料筒、落料機構、送料機構、頂料機構等部分(fēn)組成
11. 物(wù)料筒采用(yòng)透明(míng)有機玻璃制作,能存放≥10個物(wù)料
12. 落料機構采用(yòng)鋁制材料加工成型
13. 送料機構、頂料機構氣缸驅動控制
14. 擰蓋機構由擰蓋主軸電機、電機護罩、擰蓋升降機構、頂蓋機構等部分(fēn)組成(在标書中提供設計圖紙)
15. 擰蓋升降機構、頂蓋機構由氣缸驅動控制(在标書中提供設計圖紙)
16. 控制系統布置于萬能網孔控制闆或桌面平台上
17. 配置有相當于或優于西門子 SMART SR40 / ST40 /SR60系統
18. 控制要求配套的(de)低壓控制器件
19. 低壓控制器件采用(yòng)相當于或優于施耐德等國際品牌産品
20. 控制面闆采用(yòng)優質PVC内置電路“模組式”設計
21. 控制按鈕采用(yòng)輕觸式按鍵設計
22. 設置有中英文“啓動、停止、運行、單機、聯機、急停”等控制功能
三、檢測分(fēn)揀單元
技術參數:
1. 工作台尺寸:單站尺寸:≥600mm×720mm×780mm
2. 檢測分(fēn)揀單元由工作實訓平台、龍門檢測機構、物(wù)料傳輸皮帶、不合格品處置機構等部分(fēn)組成
3. 對裝配後的(de)産品進行檢測
4. 将不合格的(de)物(wù)料進行分(fēn)揀處理(lǐ)
5. 工作實訓平台采用(yòng)鋼鋁結構尺寸≥600mm×720mm×780mm
6. 桌體采用(yòng)1.5mm厚的(de)鋼闆做(zuò)骨架
7. 桌面采用(yòng)20×60mm鋁型材拼接成型
8. 根據執行機構的(de)聯機情況随意調整安裝位置
9. 龍門檢測機構采用(yòng)拱門式結構
10. 龍門檢測機構裝置有反射式傳感器和(hé)光(guāng)纖式傳感器
11. 龍門檢測機構裝置有進行物(wù)料有無、瓶蓋擰緊與否等工況的(de)檢測
12. 機構有反應檢測合格與否信号的(de)七彩燈帶
13. 物(wù)料傳輸皮帶與前工作單元的(de)傳輸皮帶采用(yòng)統一設計
14. 不合格品處置機構由推送機構、不合格品傳輸皮帶及物(wù)料檢測傳感器組成
15. 推送機構采用(yòng)雙軸氣缸驅動
16. 不合格品傳輸皮帶采用(yòng)直流電機驅動
17. 控制系統布置于萬能網孔控制闆或桌面平台上
18. 配置有相當于或優于西門子 SMART SR40 / ST40 /SR60系統
19. 控制要求配套的(de)低壓控制器件
20. 低壓控制器件采用(yòng)相當于或優于施耐德等國際品牌産品
21. 控制面闆采用(yòng)PVC内置電路“模組式”設計
22. 控制按鈕采用(yòng)輕觸式按鍵設計
23. 設置有中英文“啓動、停止、運行、單機、聯機、急停”等控制功能
四、6軸機器人(rén)單元
技術參數:
1. 工作台尺寸:單站尺寸:≥600mm×720mm×780mm
2. 桌體采用(yòng)§1.5mm厚的(de)鋼闆做(zuò)骨架
3. 6軸工業機器人(rén)采用(yòng)優于或相當ABB IRB120品牌
4. 6軸工業機器人(rén)載重量≥2Kg
5. 6軸機器人(rén)單元由工作實訓平台、6軸工業機器人(rén)、物(wù)料提升機構及其控制系統組成
6. 工作實訓平台采用(yòng)鋼鋁結構,尺寸≥600mm×720mm×780mm
7. 桌體采用(yòng)§1.5mm厚的(de)鋼闆做(zuò)骨架,外表面噴塗彩色環氧聚塑
8. 桌面采用(yòng)20×60mm鋁型材拼接成型
9. 可(kě)根據執行機構的(de)聯機情況随意調整安裝位置
10. 工業機器人(rén)配置有氣動手抓和(hé)真空吸盤兩種夾具
11. 工業機器人(rén)可(kě)實現搬運、裝配、貼标等功能
12. 物(wù)料提升機構采用(yòng)步進電機控制,
13. 物(wù)料提升機構可(kě)同時儲放三個物(wù)料,能實現自動提升
14. 控制系統根據布置于萬能網孔控制闆或桌面平台上,
15. 配置有相當于或優于西門子 SMART SR40 / ST40 /SR60系統
16. 控制要求配套的(de)低壓控制器件
17. 低壓控制器件采用(yòng)相當于或優于施耐德等國際品牌産品
18. 控制面闆采用(yòng)PVC内置電路“模組式”設計
19. 控制按鈕采用(yòng)輕觸式按鍵設計
20. 設置有中英文“啓動、停止、運行、單機、聯機、急停”等控制功能
五、成品入庫單元
技術參數:
1. 工作台尺寸:單站尺寸:≥600mm×720mm×780mm
2. 桌體采用(yòng)1.5mm厚的(de)鋼闆做(zuò)骨架
3. 交流伺服系統控制成品入庫單元由工作實訓平台、環形倉庫、環形碼垛機、氣壓控制單元、觸摸屏及其控制系統組成
4. 工作實訓平台采用(yòng)鋼鋁結構,尺寸≥600mm×720mm×780mm
5. 要求桌體采用(yòng)1.5mm厚的(de)鋼闆做(zuò)骨架,外表面噴塗彩色環氧聚塑
6. 桌面采用(yòng)20×60mm鋁型材拼接成型
7. 可(kě)根據執行機構的(de)聯機情況随意調整安裝位置
8. 環形倉庫采用(yòng)≥8mm厚的(de)鋁闆加工成型
9. 按三層9倉位布置
10. 倉位上有與物(wù)料盒規格一緻的(de)凹槽
11. 偏于物(wù)料盒的(de)存儲和(hé)精準定位
12. 每倉位均安裝有檢測傳感器
13. 可(kě)實時反應倉位的(de)存儲狀态
14. 環形碼垛機與環形倉庫配套,運動部分(fēn)交流伺服系統控制,物(wù)料的(de)取送采用(yòng)真空吸盤實現,運動機構采用(yòng)的(de)滾珠絲杆,可(kě)将物(wù)料盒精準的(de)放置于每個倉位
15. 氣壓控制單元由氣壓三聯件、用(yòng)氣量計數器等組成,能調節用(yòng)氣壓力,能檢測和(hé)記錄系統的(de)用(yòng)氣數量
16. 控制系統根據控制要求布置于萬能網孔控制闆或桌面平台上
17. 配置有相當于或優于西門子 SMART SR40 / ST40 /SR60系統
18. 相當于或優于三菱MR-JE-10A的(de)交流伺服系統(配套交流伺服電機)
19. 控制要求配套的(de)低壓控制器件
20. 低壓控制器件采用(yòng)相當于或優于施耐德等國際品牌産品
21. 控制面闆采用(yòng)PVC内置電路“模組式”設計
22. 控制按鈕采用(yòng)輕觸式按鍵設計
23. 設置有中英文“啓動、停止、運行、單機、聯機、急停”等控制功能
六、計算(suàn)機編程工作台
長x寬x高(gāo):600mm×700mm×720mm±20mm。配置2台有相當于或優于聯想系統配置相當于或優于ThinkM910T I7-7700(主頻3.6)/16G/2T/DVDRW/GT730 2G獨顯/DOS/Q270主闆/18L配19.5顯示器,配置4個學生椅
七、裝配與維修工作台
1. 尺寸:1400mm×700mm×780mm±20mm (長×寬×高(gāo))
2. 要求由台身和(hé)台面、和(hé)工具櫃三大(dà)部分(fēn)組成
3. 要求帶一體化(huà)存儲式工具櫃,3層抽屜式,帶管理(lǐ)功能。
八、電源盒模塊
1. 爲8個單元提供交流電源
2. 有3路爲3相5線電源
3. 5路爲單相3線電源
4. 具有漏電保護、過流保護、等用(yòng)電安全保護功能
九、技術參數
1.設備技術性能:
2.額定電壓:AC380V ±10%
3.額定功率:3.3KW
4.安全保護功能:急停按鈕,漏電保護,過欠壓保護,過流保護,過熱保護。
伺服:相當于或優于驅動器MR-JE-10A/電機HF-KN-13J-S100
通(tōng)用(yòng)變頻器:相當于或優于FR-D740-0.4K
步進電機:XY系列
機器人(rén):相當于或優于ABB IRB120
機器人(rén)控制器:相當于或優于ABB IRB120
十、實訓考核項目
1、PLC基礎任務實訓
(1)PLC定時器元件應用(yòng)
(2)PLC計數器元件應用(yòng)
(3)PLC PLSR指令及相關特殊功能元件應用(yòng)
(4)PLC PLSY指令及相關特殊功能元件應用(yòng)
(5)PLC高(gāo)速脈沖輸入及相關特殊功能元件應用(yòng)
(6)From/To模塊讀寫特殊功能指令應用(yòng)
(7)PLC PID特殊功能指令應用(yòng)
(8)PLC RS協議通(tōng)訊指令及相關特殊功能元件應用(yòng)
(9)PLC N:N網絡通(tōng)訊令及相關特殊功能元件應用(yòng)
(10)PLC 并行連接模式網絡通(tōng)訊及相關特殊功能元件應用(yòng)
2、觸摸屏
(1)觸摸屏的(de)工程創建、編輯與下(xià)載操作
(2)觸摸屏的(de)離線模拟應用(yòng)
(3)觸摸屏的(de)在線模拟應用(yòng)
(4)觸摸屏的(de)輸入輸出位元件應用(yòng)
(5)觸摸屏的(de)輸入輸出字元件應用(yòng)
(6)觸摸屏的(de)XY曲線圖形元件應用(yòng)
(7)觸摸屏的(de)動畫元件應用(yòng)
(8)觸摸屏的(de)數值、文本輸入顯示元件應用(yòng)
(9)觸摸屏的(de)報警信息、事件登錄等元件的(de)應用(yòng)
(10)觸摸屏的(de)定時器等元件的(de)應用(yòng)
(11)觸摸屏的(de)系統綜合應用(yòng)
3、上料灌裝單元
(1)光(guāng)電傳感器的(de)接線與調試
(2)直流電機的(de)接線與調試
(3)雙聯氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(4)基于皮帶輸送機構的(de)機械安裝與調試
(5)基于灌裝機構的(de)機械安裝與調試
(6)基于上料灌裝單元控制挂闆的(de)電氣安裝與調試
(7)基于上料灌裝單元模型綜合安裝、接線與調試
(8)基于PLC的(de)皮帶上料機構運行控制
(9)基于PLC的(de)灌裝機構運行控制
(10)基于PLC的(de)上料灌裝單元綜合運行控制
4、加蓋擰蓋單元
(1)光(guāng)電傳感器的(de)接線與調試
(2)直流電機的(de)接線與調試
(3)筆型氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(4)雙聯氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(5)基于皮帶輸送機構的(de)機械安裝與調試
(6)基于加蓋機構的(de)機械安裝與調試
(7)基于擰蓋機構的(de)機械安裝與調試
(8)基于加蓋擰蓋單元控制挂闆的(de)電氣安裝與調試
(9)基于加蓋擰蓋單元模型綜合安裝、接線與調試
(10)基于PLC的(de)加蓋機構運行控制
(11)基于PLC的(de)擰蓋機構運行控制
(12)基于PLC的(de)加蓋擰蓋單元綜合運行控制
5、檢測分(fēn)揀單元
(1)光(guāng)電傳感器的(de)接線與調試
(2)光(guāng)纖傳感器的(de)接線與調試
(3)測水(shuǐ)傳感器的(de)接線與調試
(4)直流電機的(de)接線與調試
(5)雙聯氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(6)基于皮帶輸送機構的(de)機械安裝與調試
(7)基于檢測分(fēn)揀單元控制挂闆的(de)電氣安裝與調試
(8)基于檢測分(fēn)揀單元模型綜合安裝、接線與調試
(9)基于PLC的(de)檢測分(fēn)揀單元綜合運行控制
6、6軸機器人(rén)搬運單元
(1)光(guāng)電傳感器的(de)接線與調試
(2)行程開關的(de)接線與調試
(3)步進電機的(de)接線與調試
(4)雙聯氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(5)基于步進升降機構的(de)機械安裝與調試
(6)基于機器人(rén)夾具的(de)機械安裝與調試
(7)6軸機器人(rén)的(de)組成應用(yòng)
(8)6軸機器人(rén)的(de)初始化(huà)應用(yòng)操作
(9)6軸機器人(rén)的(de)編程/仿真軟件應用(yòng)操作
(10)6軸機器人(rén)的(de)示教單元應用(yòng)操作
(11)6軸機器人(rén)控制器應用(yòng)操作
(12)6軸機器人(rén)的(de)應用(yòng)編程
(13)6軸機器人(rén)的(de)I/O通(tōng)訊應用(yòng)設計
(14)6軸機器人(rén)的(de)RS232通(tōng)訊應用(yòng)設計
(15)6軸機器人(rén)的(de)安全操作應用(yòng)設計
(16)6軸機器人(rén)的(de)綜合應用(yòng)設計
(17)基于PLC的(de)步進升降機構運行控制
(18)基于PLC的(de)6軸機器人(rén)物(wù)料瓶子吸取放置應用(yòng)控制
(19)基于PLC的(de)6軸機器人(rén)搬運單元綜合運行控制
7、立體倉庫單元
(1)光(guāng)電傳感器的(de)接線與調試
(2)行程開關的(de)接線與調試
(3)氣動吸盤安裝與應用(yòng)
(4)雙聯氣缸的(de)安裝和(hé)氣量調節與磁性開關的(de)接線和(hé)位置調整
(5)伺服驅動器的(de)限位保護參數設置
(6)伺服驅動器的(de)電子齒輪比參數設備
(7)伺服驅動器的(de)位置模式運行控制
(8)伺服電機的(de)力矩模式運行控制
(9)伺服電機的(de)速度模式運行控制
(10)基于PLC PLSR指令的(de)運行控制
(11)基于PLC PLSY指令的(de)運行控制
(12)基于PLC的(de)水(shuǐ)平軸定位運行控制
(13)基于PLC的(de)垂直軸定位運行控制
(14)基于PLC立體倉庫綜合運行控制
